High Bees!
After a few trials on PCP-Synthesis via the N-Benzoylpiperidine route (they have all failed, if someone wants details, let me know), Swim has performed a PCP synthesis via the enamine route. The whole synthesis was illustrated with pictures, so that other bees get a easy to follow writeup…
Here we go:
Step 1: N-piperidin-cyclohexene
Into a 250ml RBF with a Dean Stark water-trap, a Dimroth reflux condensor and some boiling stones there were added 39,6ml of Piperidine, 34,5ml of cyclohexanone, 500mg of p-Toluene-sulfonic-acid and 100ml Toluene as solvent.
The mixture was heated with a heating mantle until all water had seperated (~5,4ml). Heating was stopped, and after the contents had cooled down the reaction mixture was washed with ~30ml of water to remove the catalyst acid. The organic phase was seperated, dried over Na2SO4 and distilled under aspirator vacuum to yield 45g of colourless, nearly smellless enamine. (b.p. ~ 108°C@good aspirator vacuum)

Apparatus for azeotropic removal of water

reaction mixture

water in the dean stark receiver

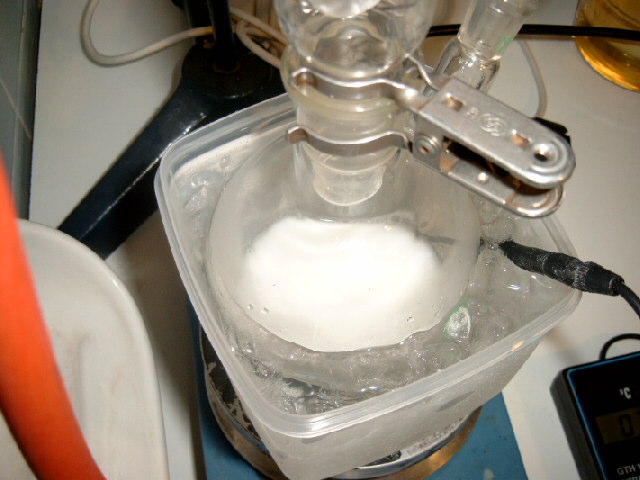
Apparatus for vacuum distillation of the reaction contents

distilled, nearly pure enamine in the recveiver
Note:
Piperidine is corrossive, toxic, and has a very unpleasent amine smell – avoid spilling it -> use a syringe!
Step 2: Removal of water from p-Toluene sulfonic acid Monohydrate
0,1mole (19g) of p-Toluene sulfonic acid Monohydrate were added to 40ml of Toluene, and heated under a Dean stark trap, until no more water seperated, and the distillate was completely clear. Theoretically water amount: 1,8ml

apparatus

boiling mixture
Notes: At first 2 Layers are formed – I think the top layer consists of Toluene, and the bottom layer consists of melted P-Toluene-Sulfonic Acid Monohydrate. -> Use a magnetic stirrer to mix the two phases well. During the seperation of water the bottom layer dissappears -> anhydrous Acid dissolves into the toluene.
Step 3: Preparing of a Phenyl Magnesium Bromide-Solution in Et2O (Grignard-Rnx)
All glassware for this step should be dried in an oven. Anhydrous solvents are absolutely necessary! (use molecular sieves or Na to dry Et2O)
Into a 250ml 3-necked RBF were added 2,4g (01,1 mole) of Mg turnings, 1 small iodine xtal, and 30ml of ether. Now there were slowly added 0,1mole of bromobenzene in 15ml of Et2O. The start of the reaction is noticed by disappearing of the purple iodine-colour, and the ether beginning to boil.
Add the residual Bromobenzene at a rate that keeps the ether refluxing. When all the bromobenzene has been added reflux the mixture for additional 3 hours to finish the reaction.

reaction just started – let bromobenzene drip into the mix slowly

apparatus for grignard rnx – note the drying tubes on condensor and dropping funnel – an effective reflux condensor is also necessary. A liebig-condensor will not work!!

closeup
Notes:
The mixture turns a bit brown during grignard reagent formation. That’s no reason to worry.
When the reaction goes to fast use a cold water bath to slow things down.
Always use magnetic stirring!
Use CaCl2-Drying tubes and an efficient reflux condensor!
Read Organikum, Vogel, etc. about grignard reactions!
Step 4: Salting your enamine from step 1 with your anhydrous acid from step 2
In a 500ml 2-Necked RBF add 16,5g of Cyclohexenyl-Piperidine (from step 1), and add 50ml of anhydrous ether. Add a stirbar, a condensor, a dropping funnel, and attach drying tubes!
Immerse the flask into an ice bath to keep temp below 5°C. Now add your anhydrous P-ToSufoAcid in Toluene, prepared in step 2. – the addition has to be done dropwise.
The enamine forms a salt with the acid (the salt isnt soluble in ether/toluene, so a white slurry is formed).

addition of the anhydrous p-Toluene Sulfonic Acid
a thick white slurry is formed
Note: use a big stirrbar to allow stirring even if the flask contents get a bit sticky.
Step 4: PCP
Now cool your Phenylmagnesium-bromide solution in an ice bath, and transfer the etheral solution into a dropping funnel. All apparatus must be absolutely dry! – Do this as quick as possible to avoid reacting of the Grignard-reagent with humidity/CO2 in the air.
Now add your Grignard-Solution to the slurry produces in Step 4. Cool with ice, and add the solution dropwise! The temp should not go above 5°C. Now the slurry gets easy stirrable again. After everything is added remove the ice bath and stir for additional 30-45min.

Phenyl Magnesium Bromide Solution transferred into dropping funnel.

addition of the grignard reagent.


after finished addition
Now pour the reaction mixture onto 200ml of crushed ice, 20g of NH4Cl and 20ml of concentratet ammonia solution. Let the ice melt and stir well. Everything should go into solution, and 2 layers form.
Transfer the Solution into a seperatory funnel and separate the organic (top) phase.

Extract the water phase once more with 50ml of Ether, and add the extract to the organic phase from above.
Now wash your combined organic phases once with 200ml of water, and dry the organic phase with Na2SO4.

washing with water

freebase in Et2O/Toluene with drying agent added.
After 30min of drying (swirl the flask sometimes) the liquid was decanted and the Na2SO4 was washed with a bit of fresh, dry Et2O. The wash was combined with the etheral solution, and a HCl-Gas generator was set together.

gassing apparatus (gas is dried by a washing bottle filled with CaCl2)
Now the freebase solution is diluted with additional 150ml of anhydrous Et2O, and gassed for ~30sek. Move your gassing tube around to avoid clogging.
when the xtals have settled down gassing is continued until no more crystals appear.
Now the solution was vacuum filtered to leave slight yellow, sticky crystals. The crystals were washed with acetone to leave ~8g of finely white PCP hydrochloride.
Notes: Maybe a acid/base extraction would avoid the stickiness of the xtals.
Be careful with HCl-gas! Its toxic, and highly corrossive!

crystals spring to live

some product drying in an crystallisation dish
Bioassay (~5mg) was used to confirm identity of the substance. – swim had a very dissiociative night, yesterday

So bee safe, have fun!
LG
xicori

